| Spec | N | Agents per Cluster (↓) | Max Cluster Fraction (↓) | Mean Pairwise Dist. (↑) | Num Clusters (↑) | Path Entropy (↑) | Path Overlap (↓) | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| D-MA | G-O | STLPY | D-MA | G-O | STLPY | D-MA | G-O | STLPY | D-MA | G-O | STLPY | D-MA | G-O | STLPY | D-MA | G-O | STLPY | ||
| Branch | 16 | 1.09 | 3.81 | 2.35 | 0.12 | 0.56 | 0.33 | 2.63 | 2.10 | 2.33 | 14.67 | 4.20 | 6.80 | 0.93 | 0.88 | 0.93 | 0.00 | 0.08 | 0.00 |
| 32 | 1.03 | 6.58 | 4.10 | 0.04 | 0.79 | 0.20 | 3.43 | 2.35 | 2.35 | 31.10 | 4.87 | 7.80 | 0.90 | 0.86 | 0.92 | 0.00 | 0.00 | 0.00 | |
| Cover | 16 | 1.08 | 6.40 | 3.02 | 0.12 | 0.81 | 0.47 | 2.64 | 1.76 | 2.11 | 14.87 | 2.50 | 5.30 | 0.92 | 0.87 | 0.91 | 0.00 | 0.18 | 0.00 |
| 32 | 1.03 | 11.71 | 6.27 | 0.04 | 0.91 | 0.32 | 3.43 | 1.78 | 2.09 | 31.13 | 2.73 | 5.10 | 0.90 | 0.85 | 0.91 | 0.00 | 0.00 | 0.00 | |
| Loop | 16 | 1.04 | 4.40 | 3.40 | 0.09 | 0.64 | 0.58 | 2.43 | 1.83 | 1.82 | 15.33 | 3.63 | 4.70 | 0.90 | 0.83 | 0.89 | 0.00 | 8.72 | 0.27 |
| 32 | 1.26 | 10.00 | 5.33 | 0.04 | 0.86 | 0.41 | 2.23 | 1.83 | 1.85 | 25.30 | 3.20 | 6.00 | 0.87 | 0.79 | 0.87 | 0.20 | 2.41 | 0.00 | |
| Seq. | 16 | 1.08 | 7.74 | 2.89 | 0.11 | 0.85 | 0.41 | 2.40 | 1.32 | 2.34 | 14.87 | 2.07 | 5.53 | 0.93 | 0.90 | 0.85 | 0.00 | 0.25 | 12.42 |
| 32 | 1.45 | 18.82 | 32.00 | 0.20 | 0.86 | 0.25 | 2.24 | 0.75 | 0.94 | 22.07 | 1.70 | 1.00 | 0.91 | 0.90 | 0.94 | 0.00 | 0.00 | 3.66 | |
Supplementary Tables
Hyperparameters
| Hparam. | Value | Description |
|---|---|---|
| Diffusion Parameters | ||
| \(N_{\text{diff}}\) | 256 | Number of diffusion steps. |
| \(\lambda_{\text{STL}}\) | 1.0 | Weight for the STL loss. |
| \(\lambda_{\text{ach}}\) | 0.1 | Weight for the achievable loss. |
| \(N_{\text{sample}}\) | 40 | Max. number of plan resamples. |
| \(k_{\text{ach}}\) | 0.1 | Fraction of diffusion steps to compute achievable loss. |
| \(\epsilon_{\text{resample}}\) | 0.1 | Min. STL loss for resampling. |
| \(\sigma_{\max}\) | 80 | Maximum noise level. |
| \(\sigma_{\min}\) | 0.002 | Minimum noise level. |
| Environment Parameters | ||
| \(T^{\text{train}}_h\) | 1000 | Time horizon in training. |
| \(T^{\text{eval}}_h\) | 3000 | Time horizon in evaluation. |
| Evaluation Parameters | ||
| \(d_{\tau}\) | 1.0 | Distance threshold for clustering. |
| \(r_{\text{grid}}\) | 0.3 | Resolution for occupancy grid. |
Dataset Coverage
SingleIntegrator Predicate Coverage
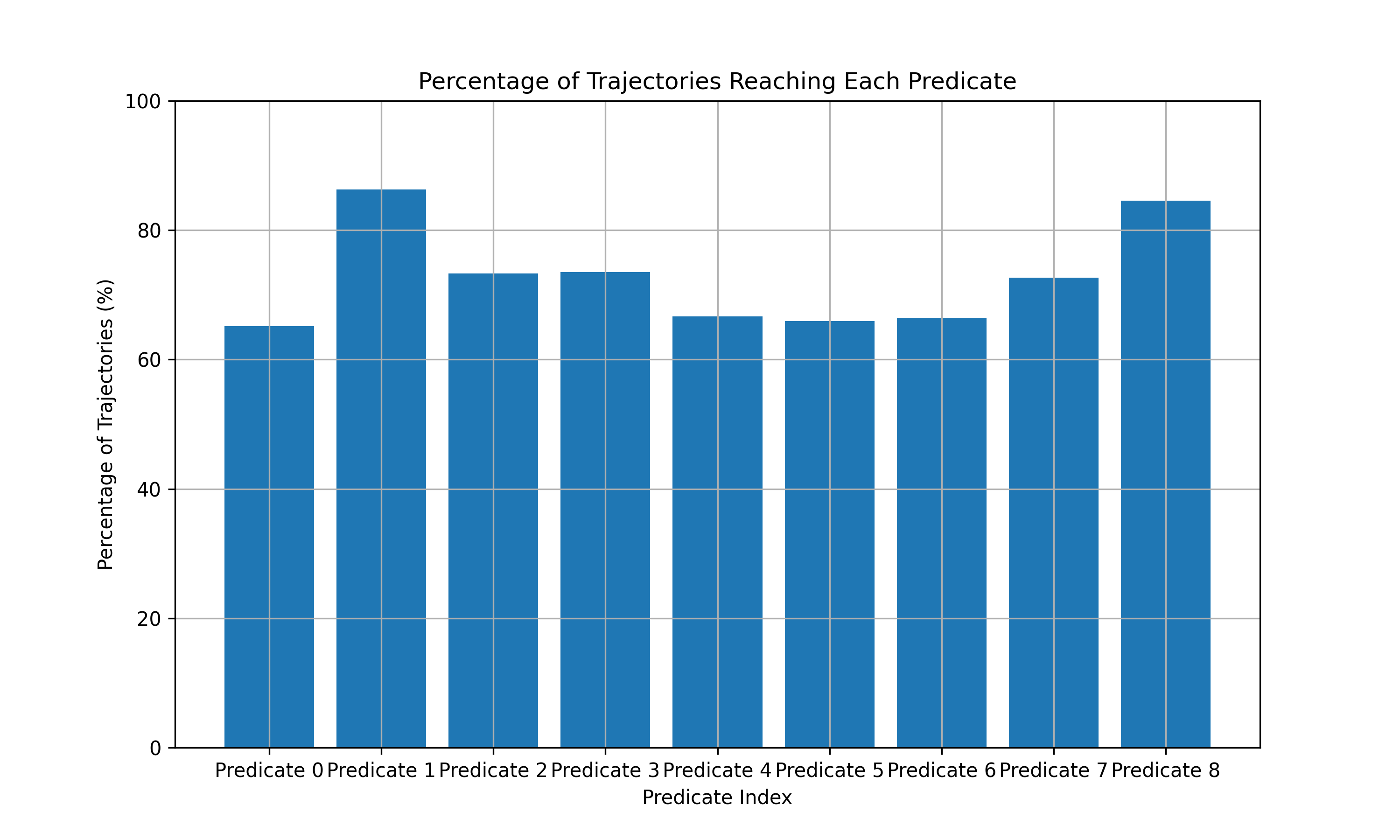
Top: Coverage of dataset over predicates (SingleIntegrator).
DubinsCar Trajectory Samples
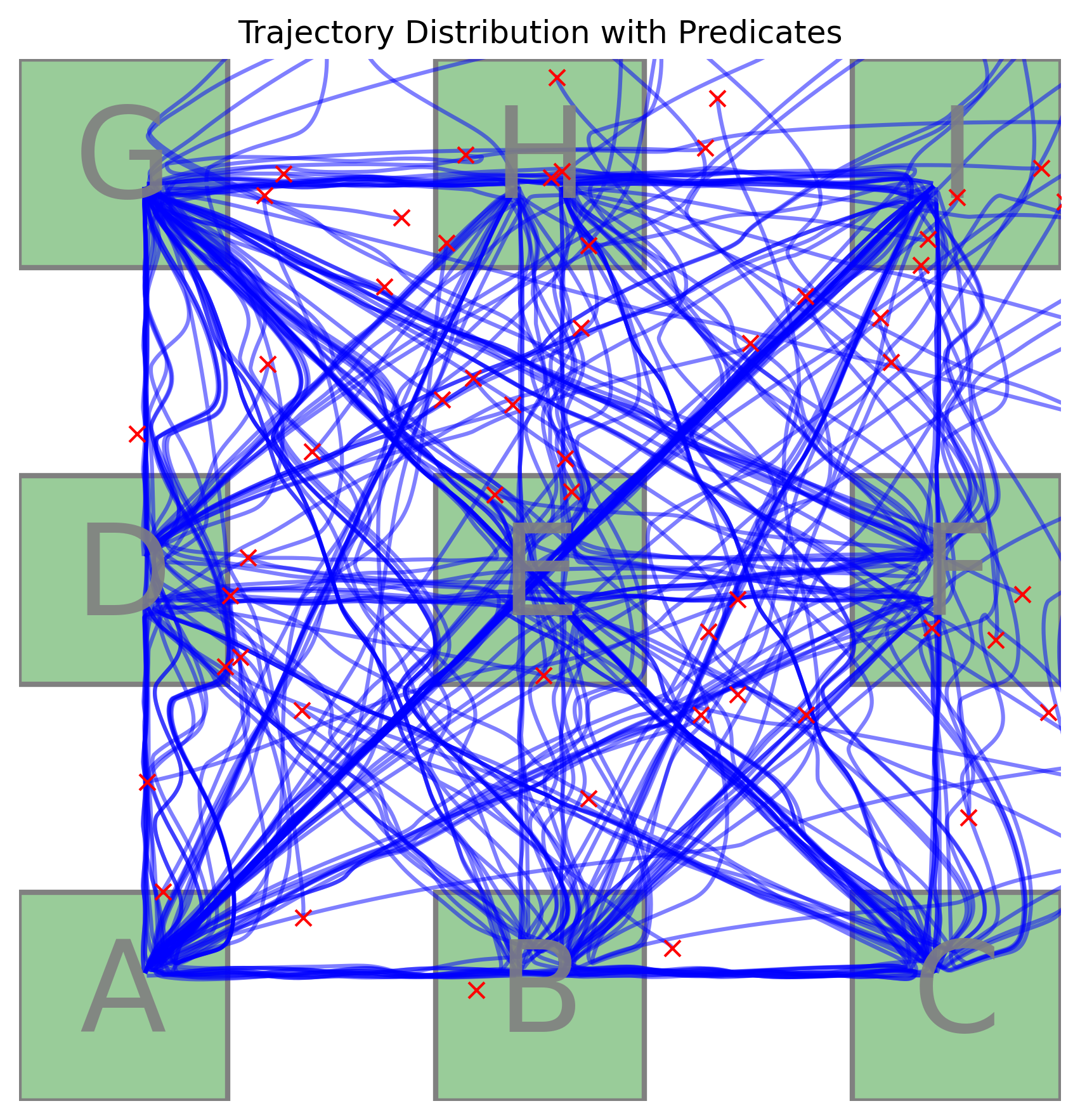
Bottom: Visualizing a subset of dataset trajectories (DubinsCar).
JIT Compilation & Resampling
| Spec | N | JIT Comp. Time (↓) | Num. Resampling (↓) | ||||
|---|---|---|---|---|---|---|---|
| D‑MA | D‑MA (No Ach.) | D‑SA | D‑MA | D‑MA (No Ach.) | D‑SA | ||
| Branch | 8 | 74.24 | 18.24 | 7.79 | 1.12 | 1.00 | 1.00 |
| 16 | 87.83 | 16.64 | 9.79 | 1.06 | 1.00 | 1.00 | |
| 32 | 120.41 | 39.78 | 12.45 | 1.06 | 1.00 | 1.47 | |
| Cover | 8 | 32.25 | 10.70 | 6.04 | 1.00 | 1.12 | 1.50 |
| 16 | 79.92 | 15.07 | 7.20 | 1.12 | 1.12 | 2.25 | |
| 32 | 71.00 | 23.48 | 8.73 | 1.03 | 1.00 | 2.47 | |
| Loop | 8 | 130.08 | 73.77 | 22.52 | 1.88 | 1.88 | 6.38 |
| 16 | 184.14 | 131.98 | 30.35 | 1.81 | 1.81 | 7.06 | |
| 32 | 287.68 | 96.92 | 42.36 | 3.12 | 3.06 | 6.91 | |
| Seq. | 8 | 57.98 | 8.82 | 6.02 | 1.75 | 1.00 | 1.12 |
| 16 | 43.11 | 16.71 | 6.58 | 1.06 | 1.06 | 1.44 | |
| 32 | 82.42 | 14.48 | 8.25 | 1.41 | 1.41 | 1.62 | |